Attitude Determination and Control System
The purpose of the Attitude Determination and Control System for AAUSAT-II is to provide initial stablisation of the spacecraft after orbit insertion and to enable fine-pointing and attitude tracking for scientific experiments. The system consist of a number of sensors and actuator being controlled on a low level by an embedded PIC processor which interfaces to other on-board computer via a CAN bus. A process on the on-board computer implements the filtering and control algorithms required to perform the control of the satellite.
Main features of the ADCS system:
- Active 3-axis magnetic stabalisation using magnetorquers
- Active 3-axis fine poiting using 3 momentum wheels
- Precision attitude determination using sensor fusion
Attitude actuators:
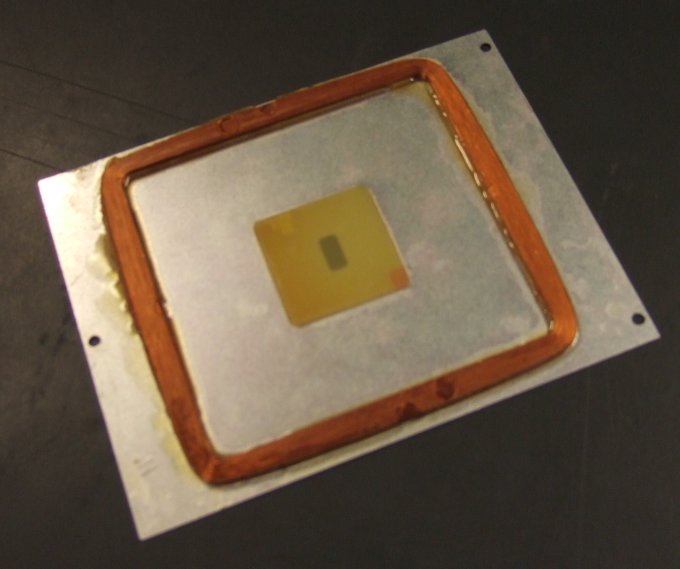
- 3 magnetorquer flat coils
- 3 brass momentum wheels driven by Maxon metal brush motors

Attitude sensors:
- 3-axis magnetometer from Honeywell
- 6 rate-gyro chips from Analog Devices
- 6 sun sensor using photo diodes
Current state and schedule
Current state:
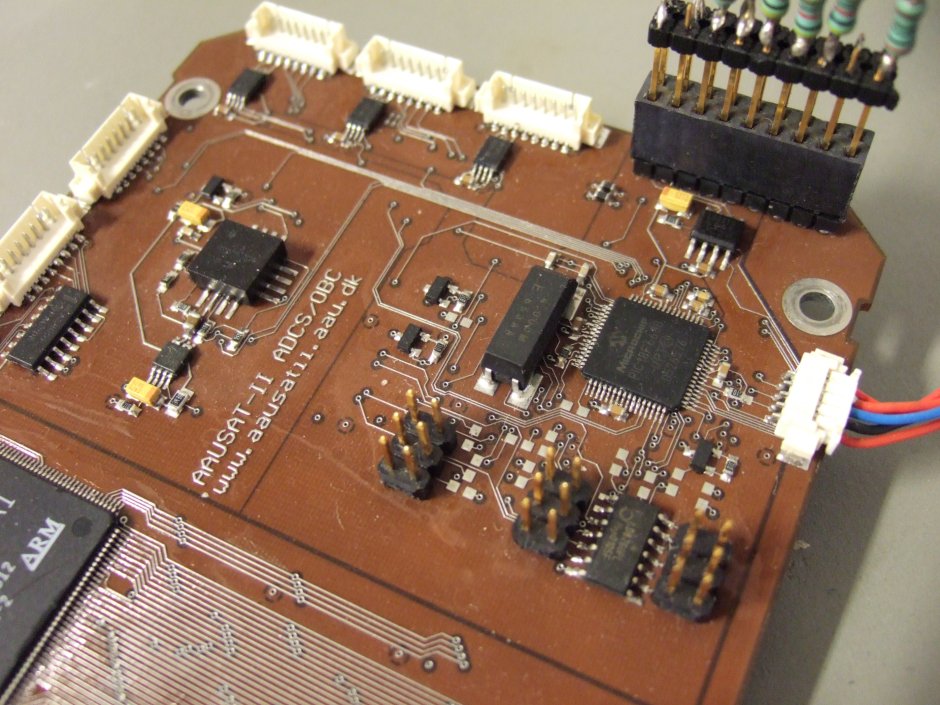
- Engineering main PCB fully tested
- Engineering gyro/sun sensor PCB being tested
- Flight Candidate 1 PCBs purchased
Next step:
- Flight Candidate 1 PCB assembly and test
Documents
| No documents yet. |
Active Members
- Jacob Deleuran Grunnet - ADCS software and gyro-PCB
- Jesper Abildgaard Larsen - ADCS main PCB hardware